 Herzlich Willkommen
an alle Schiffsmodellbauer
Herzlich Willkommen
an alle Schiffsmodellbauer
Eine kleine Übersicht in die Welt der Brushless E-Motoren
Die Theorie
Im Gegensatz zum Bürstenmotor kommutiert der BL-Motor nicht über mechanische Kontakte, sondern die Phasen werden wie beim Drehstrom-Synchronmotor (rotierend) von außen auf die Spulen geschaltet. Bei BL-Motoren werden Permanentmagnete verwendet, es handelt sich also um Synchron-Motoren; daher muss die Schaltung abhängig von der Rotorposition sein.
Ein BL-Motor kann daher nicht direkt an Gleichspannung betrieben werden, sondern er benötigt eine Steuerelektronik, die ein dreiphasen-Wechselfeld erzeugt. Diese Elektronik ist im Steller untergebracht, der mit dem Motor über drei Kabel verbunden ist.
Der Motor kann also nicht ohne diesen Steller arbeiten. Deshalb muss man diese beiden Teile stets als funktionale Einheit betrachten. Dennoch können Motor und Steller unabhängig gekauft und zusammengestellt werden.
lnnenläufer (Inrunner)
Die Wicklungen liegen außen (im Motorgehäuse), auf der Achse sind die Permanentmagnete befestigt und drehen sich im Wechselfeld der Wicklungen. Die sogenannten slotless Motoren sind immer Innenläufer. Innenläufer werden in der Regel schmaler gebaut als Außenläufer, drehen schneller und haben weniger Drehmoment. Die Polzahl ist bei Innenläufern immer gering. Innenläufer haben im Normalfall nur zwei Pole. In anderen Bereichen wurde der Innenläufer fast vollständig vom Außenläufer verdrängt beziehungsweise ersetzt. Innenläufer gelten als sehr effizient und erreichen (auch mit den Verlusten durch ein Getriebe) sehr hohe eta-Werte.
Außenläufer (Outrunner)
An der sich drehenden Motorglocke sind die Permanentmagnete befestigt. Die Motorglocke (Rotor) ist an der Achse befestigt und dreht sich außen um die Wicklungen auf dem geslottenen Eisenkern (Stator) im Inneren. Dieser sitzt auf einem Statorträger, an dem der Motor beim Einbau befestigt wird. Da sich somit ein großer Teil der äußeren Oberfläche des Motors dreht, benötigt dieser Motor einen seitlichen Spalt beim Einbau oder wird komplett außen montiert.
Diese Außenläufer sind einfach und preiswert herzustellen und stellen mittlerweile so etwas wie die Standardmotoren dar, während die niedrigpoligen Innenläufer häufig für sehr hohe Drehzahlen (Impeller, Speedmodelle) oder als Getriebeantriebe für große Luftschrauben eingesetzt werden.
Technische Daten
ns oder kV
Die spezifische Drehzahl ns (englisch = kV) gibt an, wie viele Umdrehungen pro Minute (U/min) der Motor ohne Last pro Volt Arbeitsspannung dreht.
Leerlaufstrom
Läuft der Motor ohne Last, sollte er idealerweise keinen Strom ziehen, da die induzierte Spannung genau der äußeren Spannung entspricht. Der Leerlaufstrom ist also ein Maß für die inneren Verluste1. Diese ergeben sich aus Kupferverlusten, Eisenverlusten und mechanischen Verlusten.
Innenwiderstand
Der Innenwiderstand ist ein weiteres Maß für die im Motor auftretenden Verluste. Der Innenwiderstand kann nicht beliebig verkleinert werden, da dies dickere, kürzere Wicklungen, sehr viel höhere Ströme und eine sehr hohe spezifische Drehzahl zur Folge hat. Es werden jedoch kommerziell auch geslottete highspeed Innenläufer mit 0,5 Wd ("solid slot") oder auch Highspeed Außenläufer mit sehr wenigen Windungen gebaut.
Nutzahl
Anzahl der Slots, bei den im Modellbau üblichen 3-Phasen Motoren immer durch 3 teilbar. Es werden kommerziell für Modellbaumotoren Blechschnitte mit zwischen 6 und 24 Slots (Nuten) verwendet.
Magnetzahl = Polzahl
Die Magnetzahl bestimmt mit, wie schnell ein Motor dreht, bzw. welches Drehmoment er hat. Eine höhere Anzahl Magnete führt zu höherem Drehmoment und niedrigerer Drehzahl. Die Zahl der Magnete muss eine gerade Zahl sein. Man spricht daher auch von Polpaaren.
Schaltungsart
Brushlessmotoren können in Stern- oder Dreiecksschaltung konfiguriert werden. Bei der Sternschaltung werden die Enden der drei Wicklungsleitungen zum "Sternpunkt" zusammengefasst. Bei der Dreiecksschaltung werden je ein Wicklungsanfang und ein Wicklungsende zusammengefasst und von dort die Anschlüsse nach außen geleitet.
Maximaler Dauerstrom / Maximale Dauerleistung
Die maximale Dauerleistung ergibt sich aus der thermischen Auslegung und den Verlusten des Motors. Es gibt mehrere Verlustarten, deren Summe entscheidend ist für die Qualität des Motors. siehe oben! Der maximale Dauerstrom dagegen ist vor allem vom Widerstand der Leiter in den Spulen abhängig. Da ein Einbau in ein Modell meist die thermische Auslegung verschlechtert, ist dieser Wert mit Vorsicht zu handhaben.
Drehmoment
Diese Angabe wird vom Hersteller meist nicht gemacht, ist jedoch maßgeblich dafür, wie ein Modell "aus dem Stand heraus" beschleunigt oder aber welchen Durchmesser der Propeller haben darf. Ein Maß für das Drehmoment ergibt sich aus der Leistung dividiert durch die spezifische Drehzahl (ns).
Das MOTOR TIMMING
Der exakte Timing Wert sollte auf den Motor abgestimmt werden.Ist der Timing Wert hoch,ist auch die Drehzahl und die Leistung Hoch.
Je höher das Timing desto mehr Strom zieht der Motor.Je nach Polzahl des Brushlessmotors muß die entsprechende Einstellung gewählt werden.
Timing ist nichts weiter, als eine Zeiteinstellung, die proportional zur Position des Rotors in Grad angegeben wird.
Das Timing bei E-Motoren entspricht in etwa der Funktion der Frühzündung beim Verbrenner.
Das Timing ist sehr wichtig, um einen Motor zu optimieren.
Bei falscher Einstellung kann jedoch auch Schaden am Motor entstehen.
Schaltet ein Regler Spannung auf einen Motor, liegt zwar die Spannung sofort in voller Höhe an,
der Strom fließt aber nicht sofort in voller Stärke, sondern stellt sich erst zeitverzögert ein.
Das kostet natürlich Motorleistung, da die Magnetfelder in den Spulen zu spät aufgebaut bzw abgebaut werden.
Die Magnetfelder passen ohne eine Einstellung zeitlich nicht optimal zu den Magneten.
Es kann (und Wird) zu diesen kreischenden Geräuschen des Motors kommen und kann den Motor zerstören.
Also muss die Spannung etwas früher ankommen .
Das passiert natürlich alles innerhalb von Sekunden und ist von Motor zu Motor unterschiedlich.
Zuständig für die Timingeinstellung ist der Regler, der die Grade (vereinfacht gesagt) auf dem Motor gibt.
Das Timing hängt von der Polzahl,Induktivität und der Betriebsspannung ab.
Weniger Pole haben meistens geringere Timingwerte.
Vereinfacht heißt das :
Geringe Timingwerte = geringere Stromstärke = weniger Leistung = geringere Motordrehzahl = weniger Wärme im Motor = längere Akkulaufzeit.
höhere Timingwerte = höhere Stromstärke = mehr Leistung = höhere Motordrehzahl = mehr Wärme im Motor = kürzere Akkulaufzeit.
Die Elektronik der meisen Regler hilft uns dabei die Induktivität das Motors automatisch einzustellen.
Diese automatische Timingeinstellung passt meistens.
Für ein Feintuning gibt es bei modernen Reglern die Funktion "Shift" und man kann noch zusätzlich einstellen.
Folgende Daten können als Richtwert dienen
(Herstellerangaben beachten)
0 - 3,75°- 7,5°- 11,25° für 2 – 6 polige Motoren (Innenläufer).
15°- 18,7°- 22° für 6 – 12 polige Motoren (Außenläufer).
22° - 30° für 12 – 16 polige Motoren (große Aussenläufer).
Nochmal Zusammengefasst :
Sinn und Zweck des Timing ist das
zeitliche verstellen des Kommutierungszeitpunkts gegenüber dem Magnetfeld. Dies ist notwendig weil die Motorwicklung (eineSpule) mit Induktivität "geladen" ist, dadurch setzt der Strom erst später dh. verzögert ein. Daher muss der Stromfluss früher eingesetzt werden.
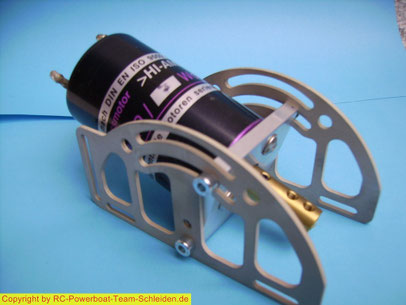
==== INNENLÄUFER (INRUNNER) ====
Ein kleiner Blick in meine Schublade
Lehner 2240-7 High Amp


LMT Lehner 1940-7.

LMT Lehner 1535-7 HiAmp 3490 KV.

Zwei nagelneue SSS - 4092 /1650 KV verbaut in einer MHZ Isiklar.
Turnigy 3974 - 2200 Kv

Die Turnigy AquaStar Sensorless Brushless Motoren
CNC gefrästen T6 Aluminium Motor,hochreinem Kupfer Wicklungen ,
gesinterten Neodym-Magneten, Billet-Aluminium Wassermantel vorinstalliert.
für tiefe V Boote
Tech. Daten
3974 - 2200 kv
Polen: 4
Max. Spannung: 18.5V (5S)
Max. Strom: 100A
Max Watt: 1200W
Widerstand: 0.0094ohm
Leerlaufstrom: 2,9 A
Durchmesser: 39mm
Durchmesser inc. Water Jacket: 49mm
Länge: 69mm
Shaft Size: 5mm
Gewicht: 415g

Wenn jemand den hier kennt mal melden.


SSS 3660.

Nachdem alles "abgebrannt" ist , der neue Motor für den Canard 2015
SSS BL Motor 3650 (KEIN LEO )
- 4 poilger Rotor, armiert
- 3300KV (upm / Volt)
- max. 60000 upm
- d= 36 mm x l= 50 mm
- LK 25 mm / M3
- Welle 5 mm x 15 mm
- max. 78 Ampere
- Leerlaufstrom 1,9 Ampere
- max. 18 Volt
- 1400 Watt
- 190 g

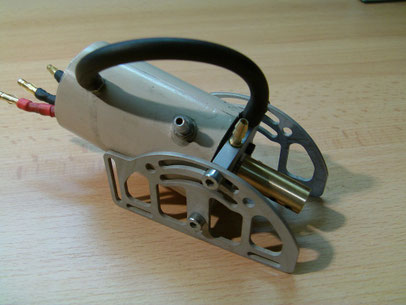
Der Motor für die Timex
4 poilger Rotor, armiert
3600KV (upm / Volt)
max. 60000 upm
d= 36 mm x l= 50 mm
LK 25 mm / M3
Welle 5 mm x 15 mm
max. 87 Ampere
Leerlaufstrom 2,3 Ampere
max. 17 Volt
1400 Watt
190 g
BL- HK 3660- 3150 Kv

HK 3660SL(wassergekühlt) speziell für Boote entwickelt.
Kv 3180
Gewicht 280g
Max. Strom 94A
Max. Spannung 18V 3-5 S LiPo
Leistung 1690 W
Welle 5mm
Großer KB Motor aus der 2013ner Lizard KB 45-77, 1600 U/Volt
KB-45-10L

So hier noch ein ganz neuer KB 45-10L mit 1800Kv
6-7 S ca 2800 Watt
Gew. 449g Welle 6mm L= 63mm dm 45 mm

2970 / 3000 KV zzt 2016 zum Testen im Canard.
Leopard 2860 / 3,5 D 2910 Um/V

Leo 2860 / 2910 Um/V mit Entsprechendem Kühlmantel und den Dichtringen.
65A , 20 Volt , 1300 Watt , Welle 4mm , 176gramm.
Hier die Daten der anderen 60ziger.
|
LBP 2860 Serie ( Durchmesser x Länge : Φ 28,0 mm × 64,0mm) |
|||||||||||
|
Modell |
Max Amps |
Max Volta-ge |
Max Macht |
KV(RPM / Volt) |
Widerstand |
No- Last Strom (7,4 V) |
Mon- Loch Tiefe |
Länge von erweitern Welle |
Welle Durch-messer( mm ) |
Gewicht |
|
|
LBP2860 / 2D |
120A |
11V |
1300W |
5050KV |
0,005 5 |
4.2A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 2,5 D |
85A |
14V |
1300W |
4050KV |
0.0 083 |
3,1 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 3 D |
80A |
17V |
1300W |
3400KV |
0.0 098 |
2,5 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 3.5D |
65A |
20V |
1300W |
2910KV |
0.0 151 |
1,9 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 2Y |
60A |
21V |
1300W |
2730KV |
0.0 113 |
1,9 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 4D |
58A |
23V |
1300W |
2550KV |
0.0 173 |
1,7 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 4.5D |
50A |
26V |
1300W |
2260KV |
0.0 252 |
1,5 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 2.5Y |
45A |
27V |
1300W |
2190KV |
0.0 210 |
1,3 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 5D |
47A |
29V |
1300W |
2040KV |
0.0 276 |
1,3 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 3J |
40A |
32V |
1300W |
1840KV |
0.0 249 |
1,1 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 6D |
38A |
35V |
1300W |
1690KV |
0.0 490 |
1,1 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 3.5Y |
34A |
37V |
1300W |
1580KV |
0.0 371 |
0. 9A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 4Y |
30A |
43V |
1300W |
1380KV |
0.0 416 |
0,8 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 4.5Y |
26A |
48V |
1300W |
1230KV |
0.0 588 |
0,7 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|
|
LBP2860 / 5Y
|
24A |
54V |
1300W |
1100KV |
0.0 658 |
0,6 A |
5mm |
1 2 mm |
Φ 4.0 |
176g |
|

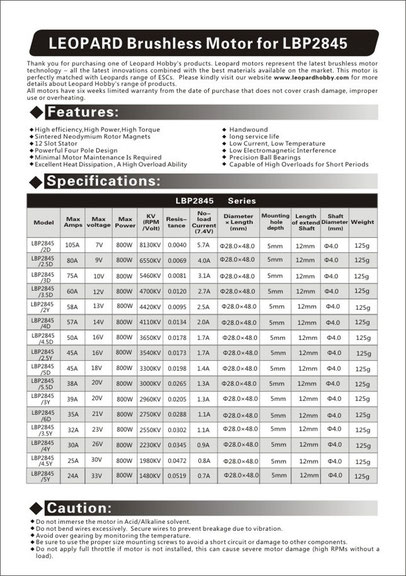
Datenblatt Leopard 2845
Hier noch das Datenblatt für die 2845er Leo's
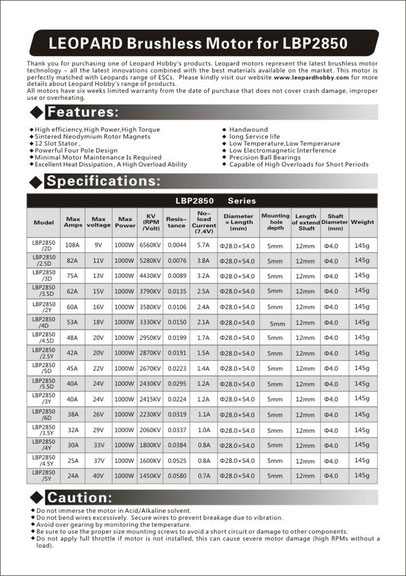
Datenblatt Leopard 2850
Hier noch das Datenblatt für die 2850er Leo's
Leopard 3650 / 2.5Y 2930 Um/V

Leo 3650 / 2.5Y 2930 Um/V
der Motor im Canard 2014 .
Leider Abgebrannt
65A , 20Volt ,1300Watt , Welle 3,175 ,185gramm
Hier noch die Daten aller 3650.
|
LBP 3650 Serie ( Durchmesser x Länge : Φ 36,0 mm × 50,0mm) |
|||||||||||
|
Modell |
Max Amps |
Max Vo-ltage |
Max Macht |
KV (RPM / Volt) |
Widerstand |
No- Last Strom (7,4 V) |
Mon- Loch Tiefe |
Länge von erweitern Welle |
Welle Durch- ter ( mm ) |
Gewicht |
|
|
LBP3650 / 2,5 D |
115A |
11V |
1300W |
5400KV |
0.0 043 |
5,9 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 3D |
100A |
13V |
1300W |
4550KV |
0.0 051 |
3,7 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 3.5D |
86A |
15V |
1300W |
3900KV |
0.00 75 |
2. 7A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 2Y |
81A |
16V |
1300W |
3 650KV |
0.00 53 |
2 . 7A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 4D |
76A |
17V |
1300W |
3 430KV |
0.00 81 |
2 . 0A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 4.5D |
68A |
19V |
1300W |
3 060KV |
0.0 112 |
1 0,7 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 2.5Y |
65A |
20V |
1300W |
2930KV |
0.0 101 |
1,9 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 5D |
61A |
21V |
1300W |
2750KV |
0.0 126 |
1,4 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 5.5D |
54A |
24V |
1300W |
2500KV |
0.0 162 |
1,2 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 3J |
54A |
24V |
1300W |
2450KV |
0.0 118 |
1,4 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 6D |
50A |
26V |
1300W |
2290KV |
0.0 178 |
1,1 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 3.5Y |
46A |
28V |
1300W |
2090KV |
0.0 182 |
1,2 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 4Y |
40A |
32V |
1300W |
1840KV |
0.0 212 |
1,0 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 4.5Y |
36A |
36V |
1300W |
1650KV |
0.0 286 |
0,8 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 5Y |
32A |
40V |
1300W |
1480KV |
0.0 318 |
0,7 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 5.5Y |
28A |
44V |
1300W |
1350KV |
0.0 412 |
0,6 A |
6mm |
16mm |
Φ3,175 |
185g |
|
|
LBP3650 / 6Y |
27A |
48V |
1300W |
1230KV |
0.0 436 |
0,6 A |
,
&, Nbsp; 6mm |
16mm |
Φ3,175 |
185g |
|

Leopard LBP 3674/ 3D 2200kv

90 A Bis 27V (6S) 2400 Watt
315 g Welle 5 mm

Aktueller Motor in der Syncron
|
|
Hier die Daten Aller 3674 im Überblick.
|
LBP 3674 Serie ( Durchmesser x Länge : Φ 36,0 mm × 74,0 mm) |
||||||||||
|
Modell |
Max Amps |
Max Volta Ge- |
Max Macht |
KV(RPM / Volt) |
Widerstand |
No- Last Strom (7,4 V) |
Moun-ting Loch Tiefe |
Länge von erweitern Welle |
Welle Durchmesser( mm ) |
Gewicht |
|
LBP3674 / 2D |
135A |
18V |
2400W |
3 270KV |
0.003 3 |
4,5 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 2 0,5 D |
110A |
22V |
2400W |
2650KV |
0.00 60 |
3. 1A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 3 D |
90A |
27V |
2400W |
2200KV |
0.00 66 |
2,7 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 3,5 D |
78A |
31V |
2400W |
1900KV |
0.0 104 |
2,2 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 2 Y |
72A |
34V |
2400W |
1700KV |
0.00 90 |
2,3 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 4 D |
70A |
35V |
2400W |
1650KV |
0.0 115 |
1,8 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 4.5D |
60A |
40V |
2400W |
1470KV |
0.0 164 |
1,4 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 2.5Y |
58A |
42V |
2400W |
1400KV |
0.0 153 |
1,8 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 5 D |
56A |
44V |
2400W |
1300KV |
0.0 175 |
1,6 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 5.5D |
50A |
48V |
2400W |
1200KV |
0.0 235 |
1,1 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 3J |
50A |
48V |
2400W |
1180KV |
, 0.0 181 |
1,4 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 6D |
48A |
51V |
2400W |
1100KV |
0.0 252 |
1,2 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 3.5Y |
42A |
58V |
2400W |
1000KV |
0.0 290 |
1,1 A |
6mm |
20mm |
Φ 5,0 |
315g |
|
LBP3674 / 4Y |
36A |
68V |
2400W |
860KV |
0.0 334 |
0,8 A |
6mm |
20mm |
Φ 5,0 |
315g |


4074 und 4068
Die großen 58er Leopard


2856er mit 3600 KV.
BL 3650 2000Kv

Der erste Motor in der Firefox 2011.
Technische Daten:
Lagerung 2 Kugellager
Drehzahl max. 60000 (Rotor)
Zulässiger Dauerstrom. 45 Ampere
Kurzzeitiger Strom max. 10 Sek. 57 Ampere
Empfohlen mit 3-5 Lipo Zellen (10-18 Volt)
RPM / Volt: 2000
Wellendurchmesser: 5 mm
Gewicht 225 Gramm
Außendurchmesser: 36 mm Länge 50 mm
3650

Aussenboarder an der Stiletto
3650

Neuer BL Mit Rippen Kühlung
Abmessungen (DxL): 41mm x 52mm
Baugröße: 500er
Umdrehungen/V: 3300
Spannungsbereich: 3-5 Lipos oder 9-15 Nicd/NiMH
Leerlaufstrom: 5.0A
Innenwiederstand: 0.010
Wellen-Ø: 5mm
Wellenlänge: ca. 12mm
Gewicht: ca. 236g
Goldstecker: 3,5mm
Reglerempfehlung: 45A
B 3650
2300 KV, 7,4V - 18,5V,
Der Motor hat eine 5 mm Welle und wiegt ca 232g
Lochabstand 19mm + 24mm
Weight (g)220
Current (A)80 - 90
Power 1100 W
Shaft A (mm)5
Length B (mm)52
Diameter C (mm)36
Shaft Length (mm)12
Total Length E (mm)64

Reely Car Motor 3650 3215 Kv
B 36-30 4000 Um/V
zzt im MHZ Speed Star
B 36-30 4000 Um/V
45A max 2-3 S LiPo
Welle 5mm 134g
700 W
BL- 2030 3500Kv

Zur zeit in der Marwede
Kleiner Innenläufer 280ziger Größe
bis 3 LiPo für kleine Rennsemmeln.
45g , 20x33 , Welle 2,3mm ,
3500Um/V , max 8A .
BL-2856 3200Kv

BL 28-56-04
2-3 LiPo, 3200Um/V,
170g, 37A, Welle 4mm
BL-2845 1300Kv

Dymond IL 2845-1300
1300Um/V 5-15 V
max 13A-20A 170Watt
125g Welle 3,2mm.
BL-2436 5000 Kv

BL 24/36 ,5000 Um/V
2-3 LiPo , Welle 2,3mm ,15A
==== Aussenläufer (Outrunner) ====
Scorpion HK 4025 1100Kv


Scorpion HK4025 1100 KV
Stator Durchmesser ............................ 40,0 mm (1.575 in)
Stator Höhe ...................................... 25,0 mm (0,975 Zoll)
Nr. Stator Arme ............................................................ . 12
Nr. von Magnet Poles ................................................... . 8
Motor Wind .................................................. 6 Turn Delta
Motor Leitung ................... 27-Strand 0.29mm (29 AWG)
Motor Kv ......................................... ..... 1.100 RPM / Volt
Leerlaufstrom (Io) ..................... 2,40 Ampere bei 10 Volt
Motor Widerstand (Rm) .................................. 0,008 Ohm
Max Dauerstrom ................................................ 100 Amps
Max Dauerleistung ........................................... 2200 Watt
Gewicht ......................................326 Gramm (11,50 Unzen)
Außendurchmesser ............................. 48,9 mm (1.925 in)
Wellendurchmesser ............................. 4,98 mm (0,196 in)
Gehäuselänge ....................................... 51,4 mm (2.024 in)
Gesamte Wellenlänge ...................... ....77,0 mm (3.031 in)

Leo LC 500.
4042 1000Kv

Der Mittelmotor meiner Sea Commander
40x42mm 1000 Kv
7 LiPo 1500g Schub
130g ,
2836- 1000 Kv

Der Motor meiner Vegesack.
Kräftiger Aussenläufer für kleine Modelle bis 3 LiPo.
70g , 28x36 mm . Welle 4mm , 1200g Schub,
1000Um/V .
Kleiner Pletti Typoon micro 6-20

Plettenberg Typoon micro 6-20
Die orginal Plettis erkennt man an dem schwarzen Gehäuse .
Es handelt sich um einen 10Poler mit zweifachem Kugellager.
Geeignet bis 700-1000g bei 2-3 LiPo .
SIE SIND BESUCHER NR
Die 200.000 sind geschaft.VIELEN DANK an ALLE
Meine HP hier ist, Stand jetzt zu 25%
Fertig und
IMMER Aktuell.
Stand 01.07.2024
Das Regler Lexikon
Ausführliche Beschreibung aller wichtiger
Parameter für Brushless Regler
jetzt zu finden unter
Rubrik Regler
Akku und LiPo Seite
Alles über LiPo's und was man wissen sollte.
Die Große Propeller Seite .
Wissenswertes über den Einsatz von Schiffspropeller und Rennboot Schrauben.
Große MOTOREN Datenbank.
Techniche Daten und Preise ehemaliger E-Motoren.
Große Schnellboot Datenbank.
Alle Raubtier und Raubvogel
Klassen mit Nato Nr.
unter Topedoboote.
Alle Schiffs Klassen
Rennboot Klassen
F- Klassen
C-Klassen
FSR-Klassen
unter Tips&Tricks